
Anomaly Detection and Concept Drift Adaptation for Dynamic Systems: A General Method with Practical Implementation Using an Industrial Collaborative Robot



Abstract
:1. Introduction
- Anomalies: Equipment faults or defects where the most common are basically of a mechanical nature.
- Concept drift [5] (CD): Changes related to the program executed. In dynamically changing and nonstationary environments, the data distribution can change over time for many different reasons. In this manuscript, the CD phenomenon has been associated with the definition of a behavioral change in the robot-executed program (different speeds, trajectories, payloads, etc.).
- 1.
- It can detect an anomaly with a model-free approach;
- 2.
- It can detect a CD with an unsupervised data-driven approach;
- 3.
- Once one of the two phenomena is detected, it reacts appropriately. If an anomaly is detected, the system will send a warning, otherwise, in the case of CD detection, the condition monitoring system will adapt to the new working conditions (concept drift adaptation [6]).
- Stage 1:
- training stage. During this stage, both models are trained through the data stream.
- Stage 2:
- CD detection stage. This stage is based on a machine learning model called the CD detector. When a CD is detected, both the anomaly detector and the CD detector return to the training stage (CD adaptation). If no CD is detected, the anomaly detection stage begins. Further details will be given in Section 3.1.
- Stage 3:
- Anomaly Detection stage. During this stage, the AD model compares the nominal data functioning with the real-time data stream, calculating residuals to monitor cobot conditions. More details will be given in Section 3.2.
2. Related Work and Background
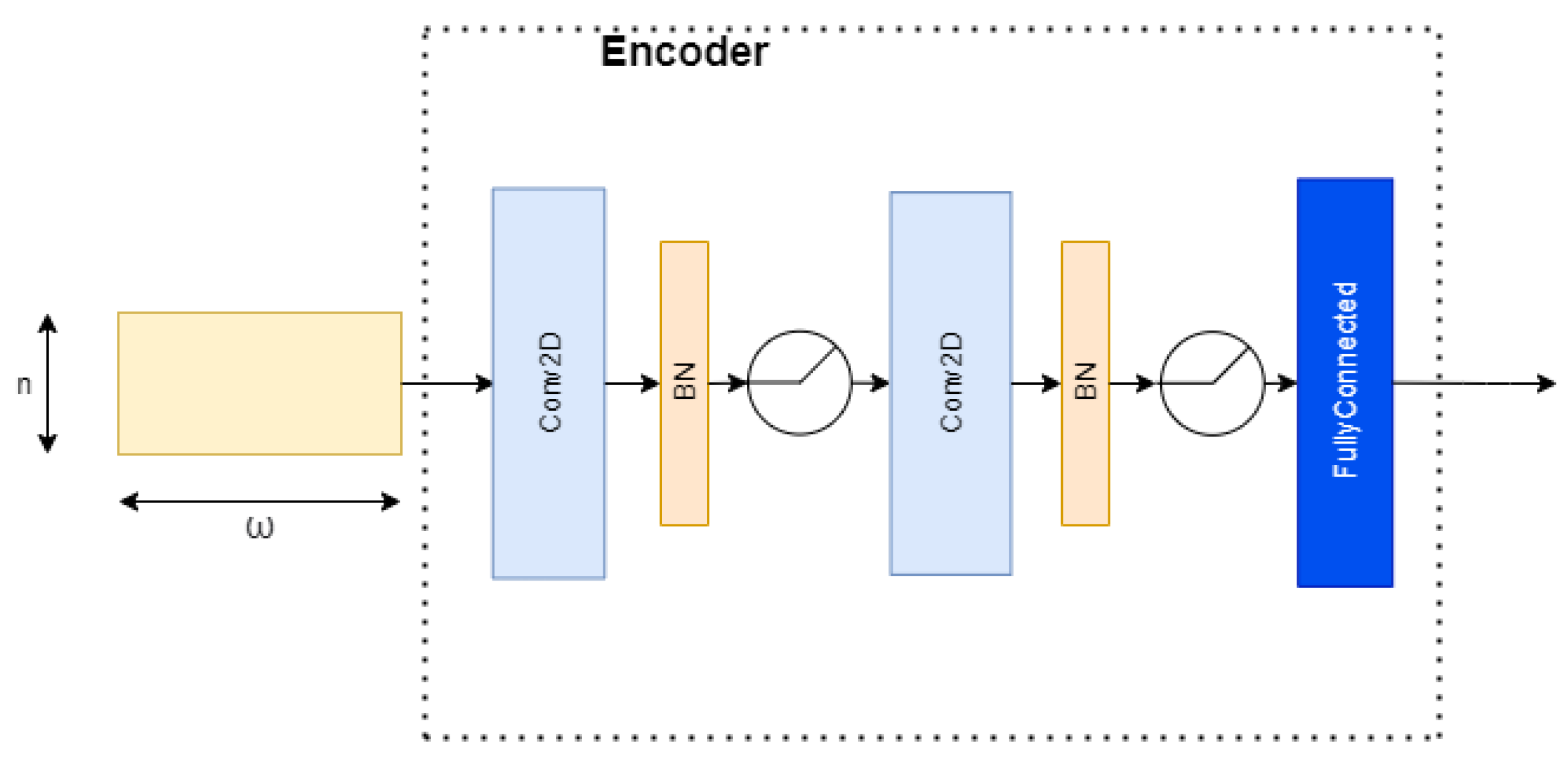
2.1. Probabilistic Encoder
2.2. Concept Drift
3. Methodology
3.1. Concept Drift Detector
3.2. Anomaly Detector
3.3. ROS-Based Condition Monitoring Architecture
4. Experimental Setup and Results
4.1. Fault Simulation
4.2. Encoder Structure and Training of the CD Detector
4.3. CD Detector Evaluation
4.4. Fault Detector Evaluation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- El Zaatari, S.; Marei, M.; Li, W.; Usman, Z. Cobot programming for collaborative industrial tasks: An overview. Robot. Auton. Syst. 2019, 116, 162–180. [Google Scholar] [CrossRef]
- Chandola, V.; Banerjee, A.; Kumar, V. Anomaly detection: A survey. ACM Comput. Surv. (CSUR) 2009, 41, 1–58. [Google Scholar] [CrossRef]
- Khalastchi, E.; Kalech, M.; Kaminka, G.A.; Lin, R. Online data-driven anomaly detection in autonomous robots. Knowl. Inf. Syst. 2015, 43, 657–688. [Google Scholar] [CrossRef]
- Borgi, T.; Hidri, A.; Neef, B.; Naceur, M.S. Data analytics for predictive maintenance of industrial robots. In Proceedings of the 2017 International Conference on Advanced Systems and Electric Technologies (IC_ASET), Hammamet, Tunisia, 14–17 January 2017; IEEE: New York, NY, USA, 2017; pp. 412–417. [Google Scholar]
- Bayram, F.; Ahmed, B.S.; Kassler, A. From concept drift to model degradation: An overview on performance-aware drift detectors. Knowl. Based Syst. 2022, 108632. [Google Scholar] [CrossRef]
- Gama, J.; Žliobaitė, I.; Bifet, A.; Pechenizkiy, M.; Bouchachia, A. A survey on concept drift adaptation. ACM Comput. Surv. (CSUR) 2014, 46, 1–37. [Google Scholar] [CrossRef]
- Khalastchi, E.; Kalech, M. On fault detection and diagnosis in robotic systems. ACM Comput. Surv. (CSUR) 2018, 51, 1–24. [Google Scholar] [CrossRef]
- Bonci, A.; Kermenov, R.; Longhi, S.; Nabissi, G. Motor Torque Analysis for diagnosis in PMSMs under non-stationary conditions. In Proceedings of the 2021 26th IEEE International Conference on Emerging Technologies and Factory Automation (ETFA), Vasteras, Sweden, 7–10 September 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Dixon, W.E.; Walker, I.D.; Dawson, D.M.; Hartranft, J.P. Fault detection for robot manipulators with parametric uncertainty: A prediction-error-based approach. IEEE Trans. Robot. Autom. 2000, 16, 689–699. [Google Scholar] [CrossRef]
- Bonci, A.; Longhi, S.; Nabissi, G. Fault Diagnosis in a belt-drive system under non-stationary conditions. An industrial case study. In Proceedings of the 2021 IEEE Workshop on Electrical Machines Design, Control and Diagnosis (WEMDCD), Modena, Italy, 8–9 April 2021; IEEE: New York, NY, USA, 2021; pp. 260–265. [Google Scholar]
- Wilhelm, Y.; Reimann, P.; Gauchel, W.; Mitschang, B. Overview on hybrid approaches to fault detection and diagnosis: Combining data-driven, physics-based and knowledge-based models. Procedia Cirp 2021, 99, 278–283. [Google Scholar] [CrossRef]
- Park, Y.S.; Yoo, D.Y.; Lee, J.W. Programmable Motion-Fault Detection for a Collaborative Robot. IEEE Access 2021, 9, 133123–133142. [Google Scholar] [CrossRef]
- Nabissi, G.; Longhi, S.; Bonci, A. ROS-Based Condition Monitoring Architecture Enabling Automatic Faults Detection in Industrial Collaborative Robots. Appl. Sci. 2023, 13, 143. [Google Scholar] [CrossRef]
- Cheng, F.; Raghavan, A.; Jung, D.; Sasaki, Y.; Tajika, Y. High-accuracy unsupervised fault detection of industrial robots using current signal analysis. In Proceedings of the 2019 IEEE International Conference on Prognostics and Health Management (ICPHM), San Francisco, CA, USA, 17–20 June 2019; IEEE: New York, NY, USA, 2019; pp. 1–8. [Google Scholar]
- Chen, T.; Liu, X.; Xia, B.; Wang, W.; Lai, Y. Unsupervised anomaly detection of industrial robots using sliding-window convolutional variational autoencoder. IEEE Access 2020, 8, 47072–47081. [Google Scholar] [CrossRef]
- Lin, R.; Khalastchi, E.; Kaminka, G.A. Detecting anomalies in unmanned vehicles using the mahalanobis distance. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; IEEE: New York, NY, USA, 2010; pp. 3038–3044. [Google Scholar]
- Mahalanobis, P.C. On the Generalized Distance in Statistics; National Institute of Science of India: New Delhi, India, 1936. [Google Scholar]
- Azzalini, D.; Bonali, L.; Amigoni, F. A minimally supervised approach based on variational autoencoders for anomaly detection in autonomous robots. IEEE Robot. Autom. Lett. 2021, 6, 2985–2992. [Google Scholar] [CrossRef]
- Graabæk, S.G.; Ancker, E.V.; Christensen, A.L.; Fugl, A.R. An Experimental Comparison of Anomaly Detection Methods for Collaborative Robot Manipulators. 2022. Available online: https://www.techrxiv.org/articles/preprint/An_Experimental_Comparison_of_Anomaly_Detection_Methods_for_Collaborative_Robot_Manipulators/19006643 (accessed on 20 February 2023).
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Jiang, G.; Xie, P.; He, H.; Yan, J. Wind turbine fault detection using a denoising autoencoder with temporal information. IEEE/ASME Trans. Mech. 2017, 23, 89–100. [Google Scholar] [CrossRef]
- Principi, E.; Rossetti, D.; Squartini, S.; Piazza, F. Unsupervised electric motor fault detection by using deep autoencoders. IEEE/CAA J. Autom. Sin. 2019, 6, 441–451. [Google Scholar] [CrossRef]
- Kullback, S.; Leibler, R.A. On information and sufficiency. Ann. Math. Stat. 1951, 22, 79–86. [Google Scholar] [CrossRef]
- Lane, T.; Brodley, C.E. Approaches to online learning and concept drift for user identification in computer security. In Proceedings of the KDD, New York, NY, USA, 27–31 August 1998; pp. 259–263. [Google Scholar]
- Žliobaitė, I.; Pechenizkiy, M.; Gama, J. An overview of concept drift applications. In Big Data Analysis: New Algorithms for a New Society; Springer: Cham, Switzerland, 2016; pp. 91–114. [Google Scholar]
- Bonci, A.; Indri, M.; Kermenov, R.; Longhi, S.; Nabissi, G. Comparison of PMSMs Motor Current Signature Analysis and Motor Torque Analysis Under Transient Conditions. In Proceedings of the 2021 IEEE 19th International Conference on Industrial Informatics (INDIN), Palma de Mallorca, Spain, 21–23 July 2021; IEEE: New York, NY, USA, 2021; pp. 1–6. [Google Scholar]
- Goodfellow, I.; Bengio, Y.; Courville, A. Deep Learning; MIT Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Nabissi, G. Omron TM Robots—ROS. 2022. Available online: https://github.com/GiakNab/Omron_TM_robots-ROS (accessed on 20 February 2023).
- Blodt, M.; Chabert, M.; Regnier, J.; Faucher, J. Mechanical load fault detection in induction motors by stator current time-frequency analysis. IEEE Trans. Ind. Appl. 2006, 42, 1454–1463. [Google Scholar] [CrossRef]
- Izagirre, U.; Andonegui, I.; Egea, A.; Zurutuza, U. A methodology and experimental implementation for industrial robot health assessment via torque signature analysis. Appl. Sci. 2020, 10, 7883. [Google Scholar] [CrossRef]
- Bittencourt, A.C.; Saarinen, K.; Sander-Tavallaey, S.; Gunnarsson, S.; Norrlöf, M. A data-driven approach to diagnostics of repetitive processes in the distribution domain–applications to gearbox diagnostics in industrial robots and rotating machines. Mechatronics 2014, 24, 1032–1041. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Data |
|---|---|
| Reach (mm) | 900 |
| Maximum payload (kg) | 4 |
| Typical speed (m/s) | 1.4 |
| Angle of the joint 1, 6 (degree) | +/−270 |
| Angle of the joint 2, 4, 5 (degree) | +/−180 |
| Angle of the joint 3 (degree) | +/−155 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kermenov, R.; Nabissi, G.; Longhi, S.; Bonci, A. Anomaly Detection and Concept Drift Adaptation for Dynamic Systems: A General Method with Practical Implementation Using an Industrial Collaborative Robot. Sensors 2023, 23, 3260. https://doi.org/10.3390/s23063260
Kermenov R, Nabissi G, Longhi S, Bonci A. Anomaly Detection and Concept Drift Adaptation for Dynamic Systems: A General Method with Practical Implementation Using an Industrial Collaborative Robot. Sensors. 2023; 23(6):3260. https://doi.org/10.3390/s23063260
Chicago/Turabian StyleKermenov, Renat, Giacomo Nabissi, Sauro Longhi, and Andrea Bonci. 2023. "Anomaly Detection and Concept Drift Adaptation for Dynamic Systems: A General Method with Practical Implementation Using an Industrial Collaborative Robot" Sensors 23, no. 6: 3260. https://doi.org/10.3390/s23063260